サイト内の現在位置を表示しています。

NEC 車両周辺監視ソフトウェア
サービス概要
NEC 車両周辺監視ソフトウェアは、10年以上に渡る豊富な実績で培われた車載向け画像認識技術をベースに、車載カメラによる移動体認識・パターン認識や、センサフュージョン(カメラ+3D LiDAR)技術、組込型Deep Learning技術など、多彩なケースに対応できる3つの先進認識ソフトウェアを提供しています。
機能・搭載例
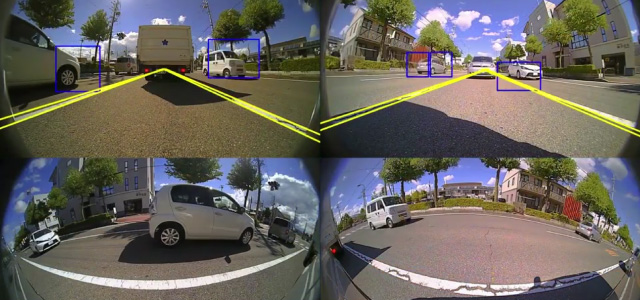
移動体認識・パターン認識ソフトウェア
- 統計的機械学習によるパターン認識をはじめ、オプティカルフローによる移動体認識、ハフ変換による白線認識など、レガシーな手法による車載画像認識には不可欠な主要ソフトウェアを提供します。
- 車載マイコン(ECU)への搭載を想定した、実装が容易な軽量ソフトウェアを実現しています*(一部FPGAを使用)。
- * いずれも、車載向け画像認識プロセッサで動作することを想定しています。

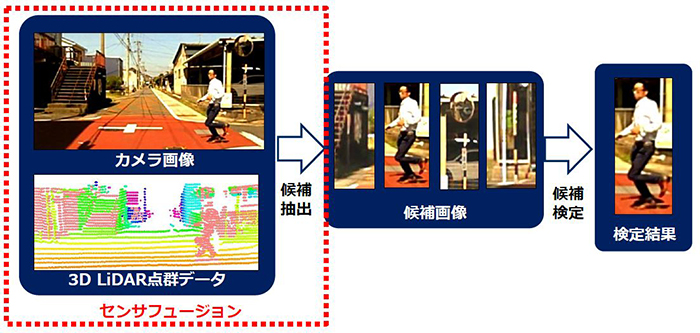
センサフュージョンソフトウェア
- カメラ単体では距離情報が得られないことや、夜間では認識低下などのロバスト性に問題があることから、縦方向もセンシング可能な3D LiDAR*と高分解能のカメラを組み合わせた手法(センサフュージョン)で、これらの課題を解決します。
- センサフュージョンソフトウェアでは、画像中から候補抽出する処理を3D LiDARの点群データで行い、候補の中から認識対象を検定する処理をカメラ画像で実施して、認識精度の向上を図っています。
- * 3D LiDARは提供範囲に含まれません。
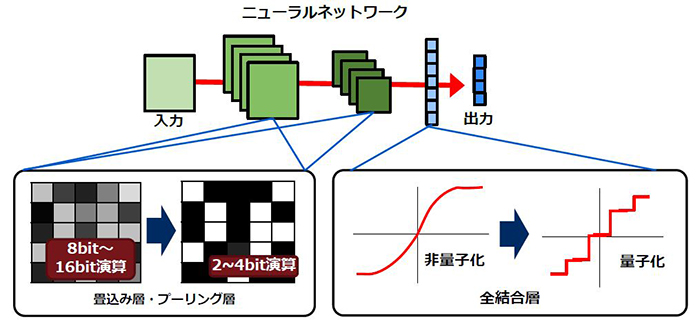
組込Deep Learningソフトウェア
- 従来の統計的機械学習と比較し、高次元の特長を扱うことができるDeep Learningの車載適用が求められています。
- Deep Learningの車載マイコン(ECU)適用には、ニューラルネットワークの最適化が必要になりますが、組込Deep Learningソフトウェアでは、ネットワークの演算ビット数を低減する手法で上記の課題を解決しています*。
- * 最適化の効果はマイコン(ECU)性能に依存します。